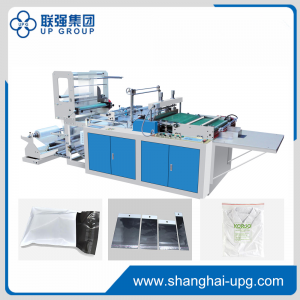
ລາຍລະອຽດ
| ໂໝດ | ການຜະນຶກສາມດ້ານ, ເຈັດ servo, ສີ່ການໃຫ້ອາຫານ, servo ເຄື່ອງຈັກຫຼັກ, ຕັດສອງເທົ່າທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້. ດ້ວຍອຸປະກອນ ultrasonic. |
| ວັດຖຸດິບ | BOPP, CPP, PET, NYLON, ຟິມພາດສະຕິກ, ຟິມພິມດ້ວຍເຄື່ອງອັດຫຼາຍຊັ້ນ, ອາລູມິນຽມບໍລິສຸດ, ຟິມພິມເຄືອບອາລູມິນຽມ, ຟິມພິມດ້ວຍເຈ້ຍພາດສະຕິກ |
| ຄວາມໄວສູງສຸດຂອງການເຮັດກະເປົ໋າ | 180 ເທື່ອ/ນາທີ |
| ຄວາມໄວປົກກະຕິ | 120 ເທື່ອ/ນາທີ (ປະທັບຕາສາມດ້ານ 100-200 ມມ) |
| ຄວາມໄວສູງສຸດຂອງສາຍສົ່ງວັດສະດຸອອກ | ≤35 ມ/ນາທີ |
| ຂະໜາດຂອງກະເປົ໋າ | |
| ຄວາມກວ້າງ | 80-580 ມມ |
| ຄວາມຍາວ | 80-500 ມມ (ຟັງຊັນການສົ່ງສອງຢ່າງ) |
| ຄວາມກວ້າງຂອງການປະທັບຕາ | 6-60 ມມ |
| ແບບກະເປົ໋າ | ຖົງປິດສາມດ້ານ, ຖົງຢືນ, ຖົງຊິບ ແລະ ຖົງປິດສີ່ດ້ານ |
| ຂະໜາດຂອງວັດສະດຸມ້ວນ | Ø 600 * 1250 ມມ |
| ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງ | ≤±1 ມມ |
| ປະລິມານມີດປະທັບຕາຄວາມຮ້ອນ | ສີ່ທີມໃນການຕິດຕັ້ງເຄື່ອງປິດຄວາມຮ້ອນແນວຕັ້ງ, ສີ່ທີມໃນການຕິດຕັ້ງເຄື່ອງເຮັດຄວາມເຢັນແນວຕັ້ງ. ສອງທີມໃນການຕິດຕັ້ງມີດປິດຄວາມຮ້ອນແບບຊິບ, ສອງທີມໃນການຕິດຕັ້ງເຄື່ອງເຮັດຄວາມເຢັນ. ສາມທີມໃນການຕິດຕັ້ງເຄື່ອງປິດຄວາມຮ້ອນແນວນອນ, ສອງທີມໃນການຕິດຕັ້ງເຄື່ອງເຮັດຄວາມເຢັນແນວນອນ |
| ປະລິມານການຄວບຄຸມອຸນຫະພູມ | 22 ເສັ້ນທາງ |
| ຂອບເຂດການຕັ້ງຄ່າການຄວບຄຸມອຸນຫະພູມ | ປົກກະຕິ ແລະ ສູງເຖິງ 360 ℃ |
| ພະລັງງານຂອງເຄື່ອງຈັກທັງໝົດ | 45 ກິໂລວັດ |
| ຂະໜາດໂດຍລວມ (ຍາວ * ກວ້າງ * ສູງ) | 14100*1750*1900 |
| ນ້ຳໜັກສຸດທິຂອງເຄື່ອງຈັກທັງໝົດ | ປະມານ 6500 ກິໂລກຣາມ |
| ສີ | ຕົວເຄື່ອງຫຼັກແມ່ນສີດຳ, ໜ້າປົກເປັນສີຂາວນົມ. |
| ສຽງລົບກວນ≤75db | |
ການຜະນຶກສາມດ້ານ
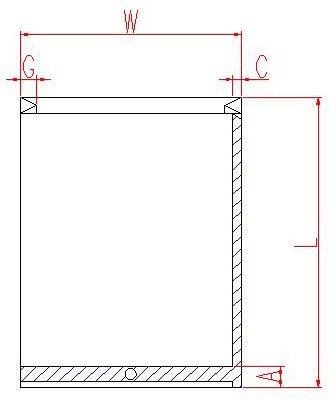
ການຜະນຶກສີ່ດ້ານ
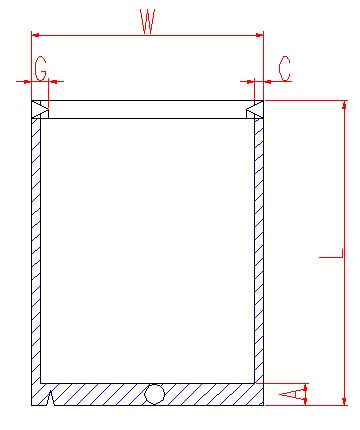
ການຜະນຶກສີ່ດ້ານ
ກະເປົ໋າຕັ້ງ
ກະເປົ໋າຕັ້ງໂຕະມີຊິບ
ລາຍລະອຽດ ແລະ ພາລາມິເຕີທີ່ກ່ຽວຂ້ອງ
| ອຸປະກອນກອບການມ້ວນ | |
| ໂຄງສ້າງ | ຄວາມຜິດພາດອັດຕະໂນມັດຕັ້ງແກ້ໄຂໂຄງສ້າງຜ່ອນຄາຍ |
| ການຄວບຄຸມຄວາມຕຶງຄຽດ | |
| ເບຣກພະລັງງານແມ່ເຫຼັກ | |
| ໂຄງສ້າງການໃຫ້ອາຫານແບບລິເລີ່ມ | |
| ຮູບແບບການຄວບຄຸມ | ເຊັນເຊີຍ້າຍລູກກິ້ງເຕັ້ນແບບລອຍຕົວຄວບຄຸມຄວາມໄວໃນການໃຫ້ອາຫານອອກ |
| ລູກກິ້ງປ້ອນຮູບຊົງແຫຼມທີ່ຕິດແໜ້ນຢ່າງແໜ້ນໜາ (ມີເພົາຂະຫຍາຍອາກາດ) | |
| ຄວາມຜິດພາດໃນການແກ້ໄຂການຄວບຄຸມ (EPC) | |
| ໂຄງສ້າງ | ການປັບລະດັບສອງຂອງແກນສະກູ, ການຍົກ ແລະ ການຕົກລົງຂອງຊັ້ນວາງ K |
| ຂັບລົດ | ຣີເລແບບແຂງຕົວຂັບເຄື່ອນມໍເຕີຊິ້ງໂຄຣນຄວາມໄວຕ່ຳ |
| ການສົ່ງຜ່ານ | ການເຊື່ອມຕໍ່ເພົາເຫຼັກ |
| ປະເພດການຄວບຄຸມ | ການກວດຈັບຕົວປ່ຽນໄຟຟ້າສະທ້ອນ, ການຄວບຄຸມເອກະລາດ. |
| ຄວາມຖືກຕ້ອງຂອງການຕິດຕາມ | 0.5 ມມ |
| ຂອບເຂດການປັບ | 150 ມມ |
| ຊິ້ນສ່ວນດ້ານກົງກັນຂ້າມຂຶ້ນ ແລະ ລົງ | |
| ໂຄງສ້າງ | ໂຄງສ້າງການກົດສະປິງປາຍດຽວຂອງລູກກິ້ງ |
| ການປັບ | ການປັບດ້ວຍຕົນເອງ |
| ອຸປະກອນປະທັບຕາແນວຕັ້ງ | |
| ໂຄງສ້າງ | ການກົດເຫຼັກສະແດງແນວຕັ້ງ, ໂຄງສ້າງການກົດສະປິງປະກອບຄວາມເຢັນ |
| ຂັບລົດ | ເຄື່ອງຈັກຫຼັກຂັບກ້ານເຊື່ອມຕໍ່ຂອງກົນໄກ eccentric ເພື່ອເຮັດການເຄື່ອນໄຫວແນວຕັ້ງ |
| ປະລິມານ | 4 ທີມໃນການປະທັບຕາຄວາມຮ້ອນ, 4 ທີມໃນການເຮັດຄວາມເຢັນ |
| ຄວາມຍາວ | 700 ມມ |
| ອຸປະກອນຊິບແນວຕັ້ງ B | |
| ໂຄງສ້າງ | ເຄື່ອງລີດສະແດງແນວຕັ້ງ, ໂຄງສ້າງການກົດສະປິງປະກອບເຄື່ອງເຮັດຄວາມເຢັນ, ມີດປະທັບຕາດ້ານລຸ່ມ; ຕົວຍຶດລີດດ້ວຍຄວາມຮ້ອນເຄື່ອນທີ່ລົງເມື່ອເຄື່ອງຢຸດເຮັດວຽກ. ຕັ້ງຄ່າໃໝ່ໂດຍອັດຕະໂນມັດເມື່ອເຄື່ອງເລີ່ມຕົ້ນ. |
| ຂັບລົດ | ເຄື່ອງຈັກຫຼັກຂັບກ້ານເຊື່ອມຕໍ່ຂອງກົນໄກ eccentric ເພື່ອເຮັດການເຄື່ອນໄຫວແນວຕັ້ງ |
| ປະລິມານ | 2 ທີມໃນການປະທັບຕາຄວາມຮ້ອນ, 2 ທີມໃນການເຮັດຄວາມເຢັນ |
| ອຸປະກອນປະທັບຕາອອກຕາມແນວນອນ | |
| ໂຄງສ້າງ | ໂຄງສ້າງສະປິງປະກອບເຄື່ອງກົດເຫຼັກທີ່ສະແດງອອກຕາມແນວນອນ, ປະກອບເຄື່ອງເຮັດຄວາມເຢັນ |
| ຂັບລົດ | ເຄື່ອງຈັກຫຼັກຂັບກ້ານເຊື່ອມຕໍ່ຂອງກົນໄກ eccentric ເພື່ອເຮັດການເຄື່ອນໄຫວແນວຕັ້ງ |
| ປະລິມານ | ສາມທີມກ່ຽວກັບການປະທັບຕາຄວາມຮ້ອນ, ສອງທີມກ່ຽວກັບການເຮັດຄວາມເຢັນ |
| ຄວາມຍາວ | 640 ມມ |
| ອຸປະກອນແບນອອກຕາມແນວນອນ (ແຄມຊິບແບນດ້ວຍຄວາມຮ້ອນ) | |
| ໂຄງສ້າງ | ໂຄງສ້າງສະປິງປະກອບເຄື່ອງກົດເຫຼັກທີ່ສະແດງອອກຕາມແນວນອນ |
| ຂັບລົດ | ຄືກັນກັບການປະທັບຕາອອກຕາມແນວນອນ |
| ປະລິມານ | 2 ຊຸດໃນການກົດຄວາມຮ້ອນ |
| ອຸປະກອນໃຫ້ອາຫານຟິມ | |
| ໂຄງສ້າງ | ປະເພດແຮງສຽດທານກົດລູກກິ້ງຢາງ |
| ຂັບລົດ | ກົນໄກການຜະລິດກະແສນ້ຳໄຫຼທີ່ນຳເຂົ້າດ້ວຍລະບົບດິຈິຕອນຢ່າງຄົບຖ້ວນ (Panasonic, ຍີ່ປຸ່ນ) |
| ການສົ່ງຜ່ານ | ແຖບ synchronous ແລະລໍ້ |
| ຮູບແບບການຄວບຄຸມ | ການຄວບຄຸມ PLC ແບບສູນກາງ, ການແກ້ໄຂຄວາມຍາວແບບ synchronous ແລະການຄວບຄຸມຄວາມຕຶງຄຽດກາງ |
| ຄວາມເຄັ່ງຕຶງກາງ | |
| ໂຄງສ້າງ | ໂຄງສ້າງມ້ວນຄວາມຕຶງຄຽດທີ່ລອຍຢູ່ |
| ຮູບແບບການຄວບຄຸມ | ການຄວບຄຸມ PLC ແບບລວມສູນ |
| ກົນໄກການຄວບຄຸມ | ແນວໂນ້ມການເສີມກັນຂອງການເຄື່ອນໄຫວຂອງລູກກິ້ງຄວາມຕຶງຄຽດທີ່ລອຍຕົວຄວບຄຸມຄວາມຍາວຂອງຂັ້ນຕອນ servo ກາງເພື່ອໃຫ້ບັນລຸການຢຸດ ແລະ ການເລີ່ມຕົ້ນໃນເວລາດຽວກັນ |
| ຮູບແບບການທົດສອບ | ໄຟຟ້າແມ່ເຫຼັກເຂົ້າຫາສະວິດ (NPN) |
| ຂອບເຂດການປັບຄວາມຕຶງຄຽດ | 0.1-0.2 ມມ (ການຕັ້ງຄ່າຄອມພິວເຕີ, ການຊົດເຊີຍອັດຕະໂນມັດ) |
| ອຸປະກອນສົ່ງສັນຍານຫຼັກ | |
| ໂຄງສ້າງ | ໂຄງສ້າງແກນຄัปປລິ່ງຍູ້ ແລະ ດຶງຂອງຕົວຂັບຂັນ crank |
| ຂັບລົດ | ມໍເຕີເຊີໂວ Panasonic 3KW. |
| ການສົ່ງຜ່ານ | ເຄື່ອງຈັກໄຟຟ້າລະບົບສາຍສົ່ງຫຼັກແຖບ 1: 10 ເຄື່ອງຫຼຸດຜ່ອນ |
| ຮູບແບບການຄວບຄຸມ | ການຄວບຄຸມ PLC ແບບລວມສູນ |
| ໂໝດແລ່ນ | ມໍເຕີຫຼັກທີ່ແລ່ນຂັບເຄື່ອນໂຄງເພື່ອເຮັດການເຄື່ອນໄຫວແນວຕັ້ງ |
| ອຸປະກອນກຳນົດຕຳແໜ່ງອັດຕະໂນມັດ | |
| ຮູບແບບການທົດສອບ | ການທົດສອບການຕິດຕາມຂອງເຊັນເຊີໂຟໂຕອີເລັກຕຣິກສະທ້ອນ |
| ການທົດສອບຄວາມຖືກຕ້ອງ | 0.01- 0.25 ມມ |
| ຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງແບບປະສົມປະສານ | ≤0.5-1 ມມ |
| ຂອບເຂດການຄົ້ນຫາດ້ວຍແສງໄຟຟ້າ | ±3 ມມ |
| ການແກ້ໄຂຂອບເຂດຄວາມສົມດຸນ | ±3 ມມ |
| ການແກ້ໄຂຕຳແໜ່ງຢ່າງชาญฉลาด | ຕິດຕາມ servo ເພື່ອປັບຄວາມສະເໝີພາບໃນປະຈຸບັນ, ລະບົບແກ້ໄຂການເຄື່ອນໄຫວອັດຕະໂນມັດດ້ວຍແສງໄຟຟ້າ |
| ການຕັ້ງຄ່າການຄວບຄຸມອຸນຫະພູມ | |
| ຮູບແບບການທົດສອບ | ການທົດສອບຄູ່ຄວາມຮ້ອນ |
| ຮູບແບບການຄວບຄຸມ | ການຄວບຄຸມ PLC ແບບລວມສູນ, ການປັບ PID, ການສົ່ງຕໍ່ແບບແຂງ |
| ຂອບເຂດການຕັ້ງຄ່າອຸນຫະພູມ | ປົກກະຕິ -360 ℃ |
| ຈຸດທົດສອບອຸນຫະພູມ | ເຄື່ອງເຮັດຄວາມຮ້ອນໄຟຟ້າສ່ວນກາງ |
| ມີດຕັດສອງຊັ້ນ (ຕັດສອງຊັ້ນທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້) | |
| ໂຄງສ້າງ | ມີດຕັດດ້ານເທິງ + ອຸປະກອນປັບ + ມີດຕັດດ້ານລຸ່ມຄົງທີ່ |
| ໂໝດ | ມີດຕັດລະດູໃບໄມ້ປົ່ງ |
| ການສົ່ງຜ່ານ | ມໍເຕີຂັບຫຼັກ, ກົນໄກການເຄື່ອນໄຫວຂຶ້ນ ແລະ ລົງທີ່ບໍ່ຕັ້ງ. |
| ການປັບ | ການເຄື່ອນໄຫວອອກຕາມແນວນອນ (ສອງສົ້ນ) |
| ອຸປະກອນກະເປົ໋າຢືນ |
| ລະບົບຜ່ອນຄາຍແບບຊິ້ງໂຄຣນອັດຕະໂນມັດ, ການປັບຄວາມຕຶງຂອງການຜ່ອນຄາຍໄດ້ຟຣີ, ການພັບຂອບຂາຕັ້ງກ້ອງ. |
| ອຸປະກອນໃສ່ຮູກົມອັດຕະໂນມັດ ແລະ ຕຳແໜ່ງທີ່ຖືກຕ້ອງ. |
| ອຸປະກອນປົດລັອກຊິບອັດຕະໂນມັດ |
| ການຫຼຸດຜ່ອນຄວາມໄວຂອງເກຍດຽວແບບອິດສະຫຼະເພື່ອຫຼຸດຜ່ອນການໃຫ້ອາຫານຂອງມໍເຕີ |
| ການປັບແສງໄຟຟ້າອັດຕະໂນມັດທີ່ຮັບປະກັນຄວາມໄວປະສານກັບມໍເຕີຫຼັກ |
| ອຸປະກອນເຈາະ (ຮັບຮອງເອົາຊິ້ນສ່ວນທີ່ນໍາເຂົ້າ) | |
| ໂຄງສ້າງ | ໂຄງສ້າງການກະທົບກະເທືອນແບບຈຳລອງຫຼັກຂອງເຄື່ອງຈັກນິວເມຕິກທີ່ຮອງຮັບການໂຄ້ງງໍ |
| ຮູບແບບການຄວບຄຸມ | ການຄວບຄຸມ PLC ແບບລວມສູນ |
| ຂັບລົດ | ຄ່າ solenoid ຂອງໄດຣເລແບບ solid-state |
| ປະລິມານຂອງຂາຕັ້ງເຈາະ | ສອງທີມພື້ນຖານ (ຮູບສີ່ຫຼ່ຽມມົນ) |
| ຖັງອາກາດ | ແອແຄັດ, ໄຕ້ຫວັນ |
| ອຸປະກອນມີດເຊື່ອມ | |
| ອອກຕາມແນວນອນ: | 20 ມມ * 2 ຮາກ; 30 ມມ * 2 ຮາກ; 40 ມມ * 2 ຮາກ; 50 ມມ * 2 ຮາກ |
| ຖອຍຫຼັງຂອບ | |
| ແຫຼ່ງຈ່າຍໄຟ | ສາມເຟສ 380V, ±10%, 50HZ ຫ້າສາຍ |
| ລະດັບສຽງ | 45 ກິໂລວັດ |
| ການສະໜອງອາກາດ | ຄວາມດັນ ≥ 0.6Mpa |
| ນ້ຳເຢັນ | 3 ລິດ / ນາທີ |